









Project Description
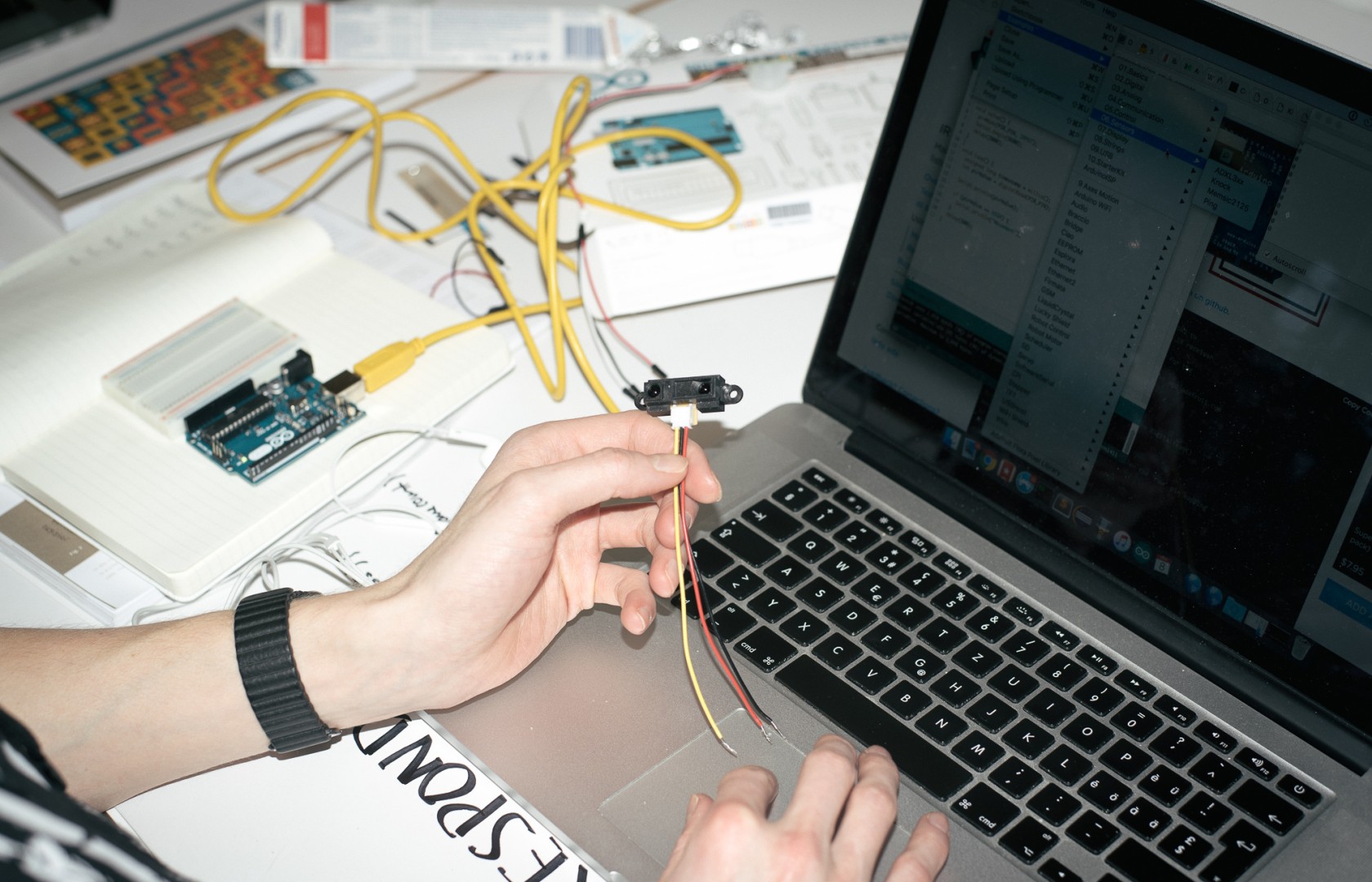
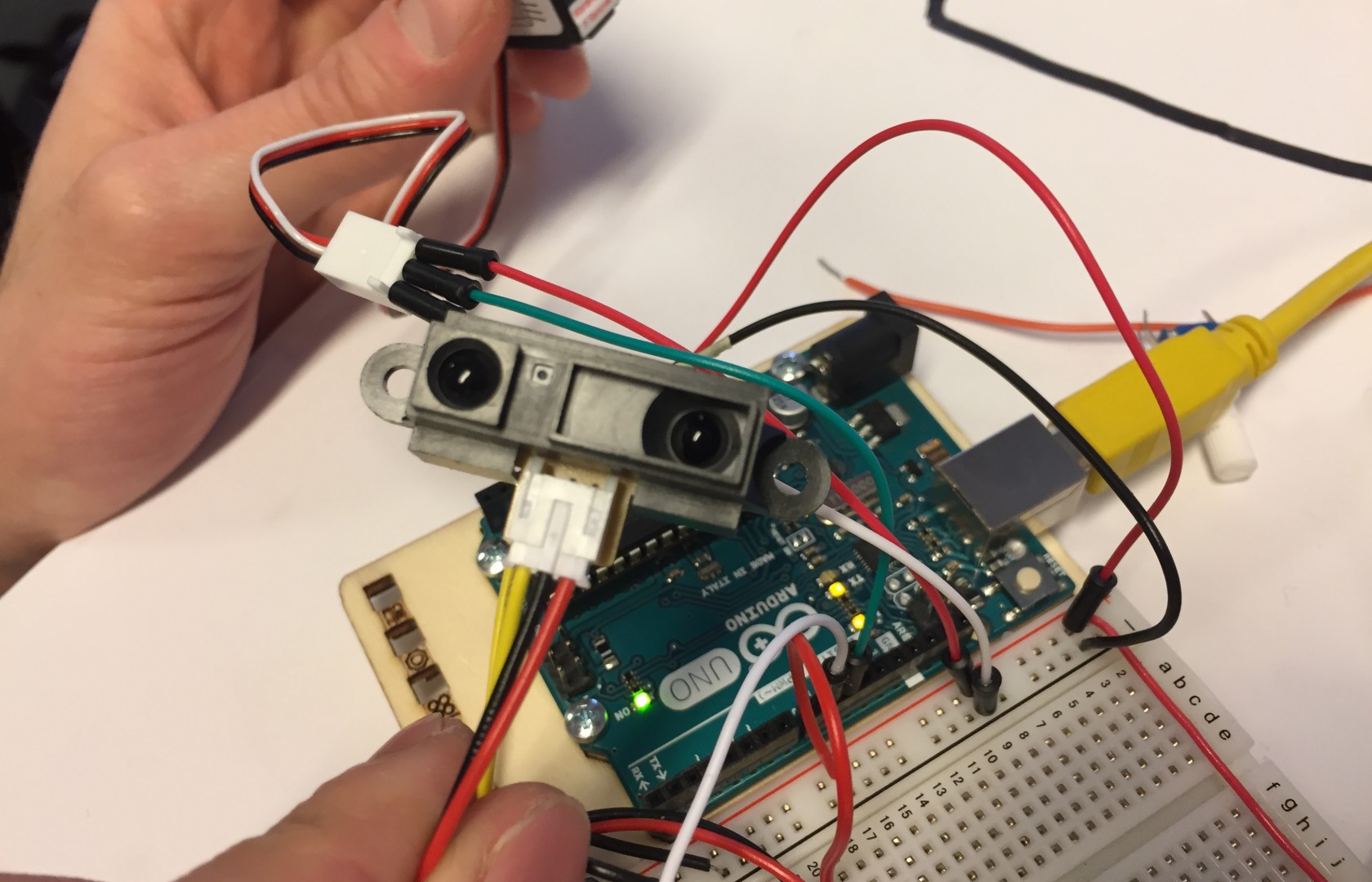
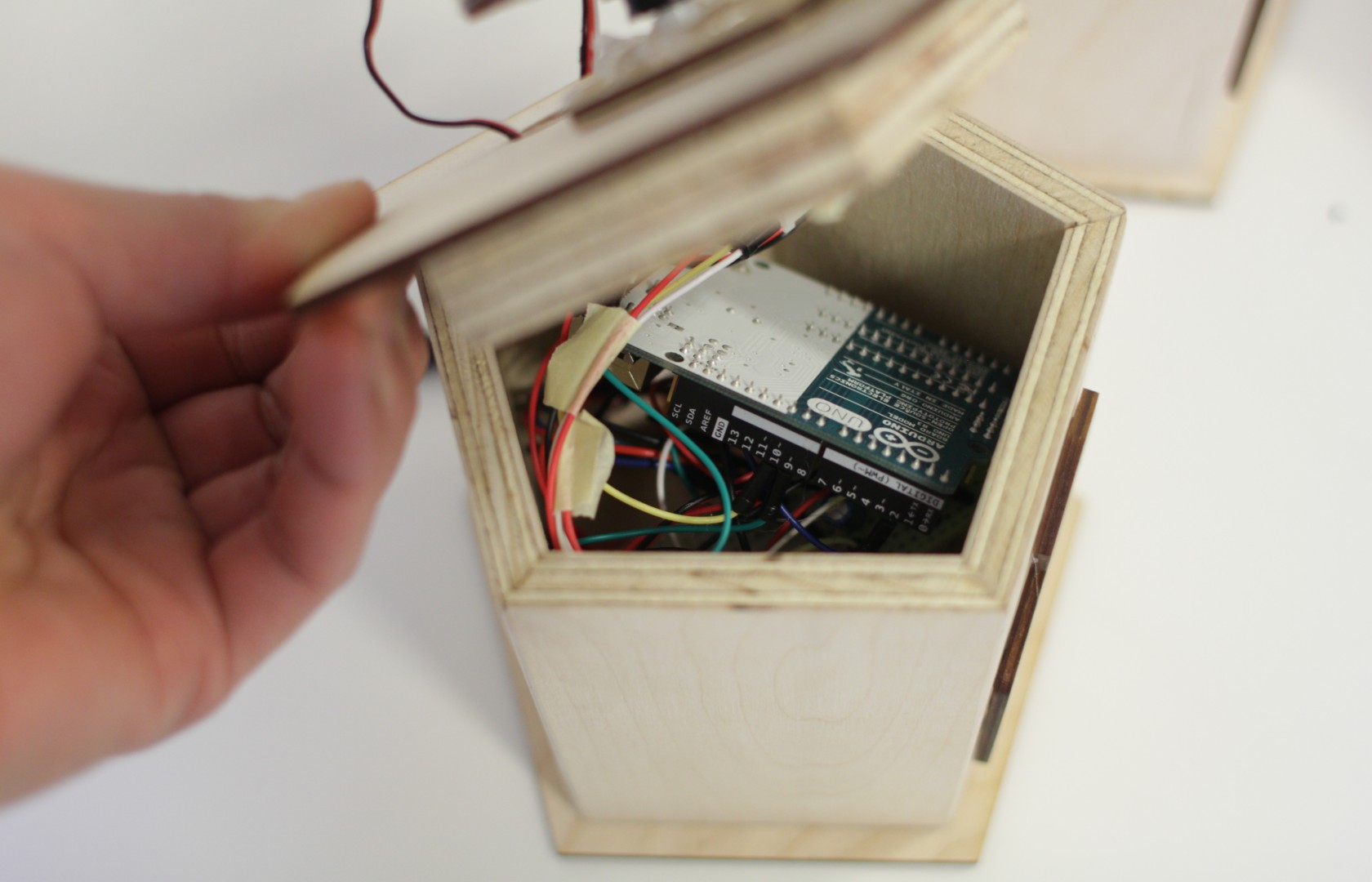
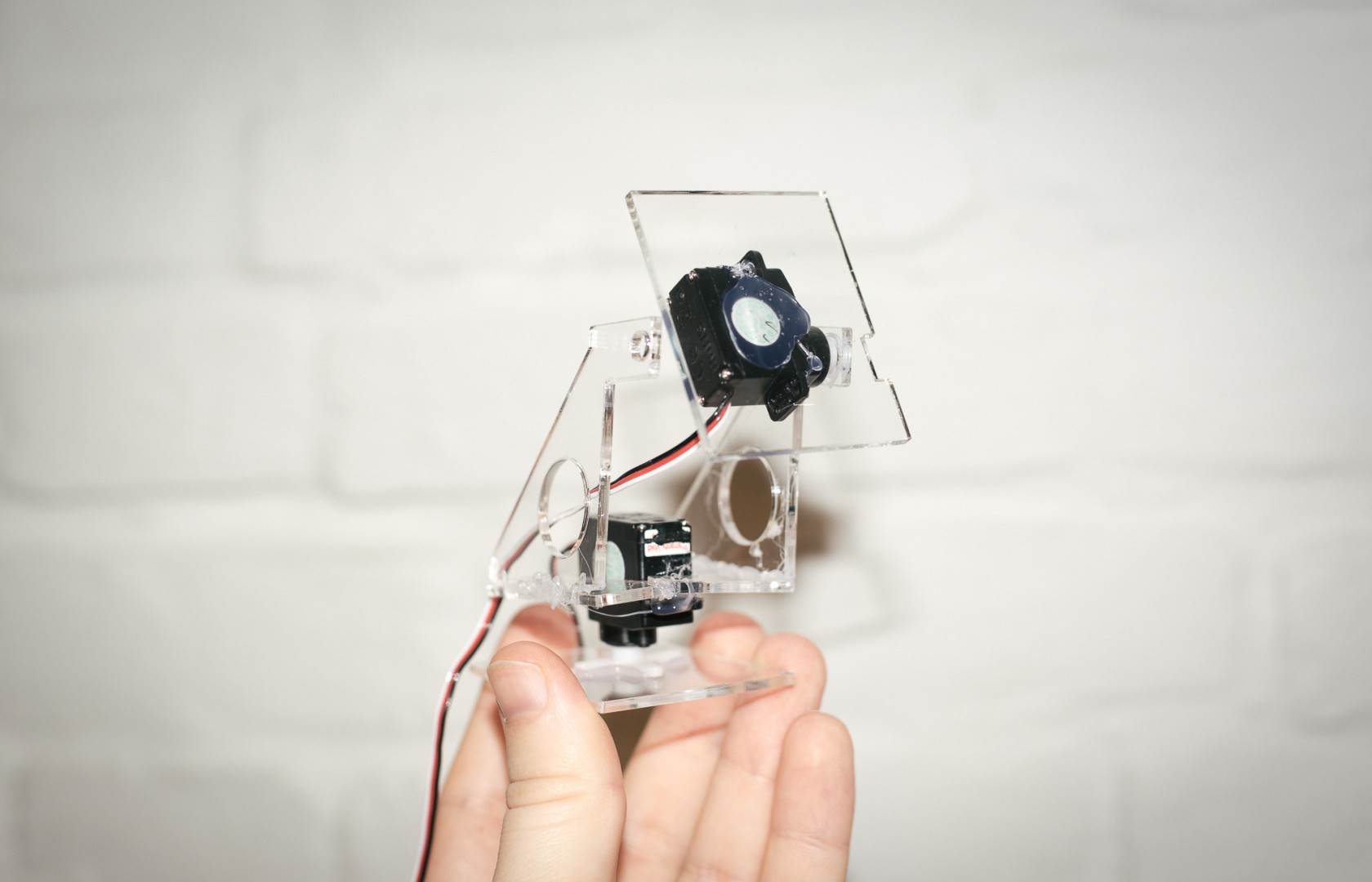
How do machines perceive their environment? How do they communicate with each other? What is the difference between human senses and electrical sensors? The Uncanny Senses is a project featuring three servo motor robots that mimic the human senses of sight, sound, and touch. Each servo bot has a plaster casted sense organ moulded from the facial features of the three team members. They are composed of an Arduino micro controller, two servo motors, and a sensor that corresponds to one of the human senses. The sight bot has a infrared proximity sensor, the sound bot has a noise level sensor and the touch bot has a capacity touch sensor.
Each bot goes through a cycle of sleep and awakening. The servo bots stay inanimate until awoken by sight, sound, or touch. The three bots are all connected and send messages to each other to inform them of what’s happening around them. When one servo bot awakes, it triggers the other two bots to become alert, mimicking the human sensing system.
“Uncanny Senses” challenges our perception of machine sensors. The creature like movements and hyperreal sensor organs gives the audience freedom to anthropomorphise the servo bots and at the same time depict how human senses are fundamentally different from sensors. Anthropomorphising the servo bots opens up a conversation around the human centric interpretation of the world and may spark some thoughts about how the world may look like if it was primarily designed for machines rather than humans.
Uncanny Senses is a one week project from the “Basic Physical Computing” course taught by Ubi De Feo.
Each bot goes through a cycle of sleep and awakening. The servo bots stay inanimate until awoken by sight, sound, or touch. The three bots are all connected and send messages to each other to inform them of what’s happening around them. When one servo bot awakes, it triggers the other two bots to become alert, mimicking the human sensing system.
“Uncanny Senses” challenges our perception of machine sensors. The creature like movements and hyperreal sensor organs gives the audience freedom to anthropomorphise the servo bots and at the same time depict how human senses are fundamentally different from sensors. Anthropomorphising the servo bots opens up a conversation around the human centric interpretation of the world and may spark some thoughts about how the world may look like if it was primarily designed for machines rather than humans.
Uncanny Senses is a one week project from the “Basic Physical Computing” course taught by Ubi De Feo.
Contribution
Throughout the whole project I was involved in the conception, the molding of the bot head pieces, the build of the bots and the documentation of the concept. I implemented the code template for the communication with the sensors and the I2C code for the communication between the bots.